Définitions
Degrés de liberté
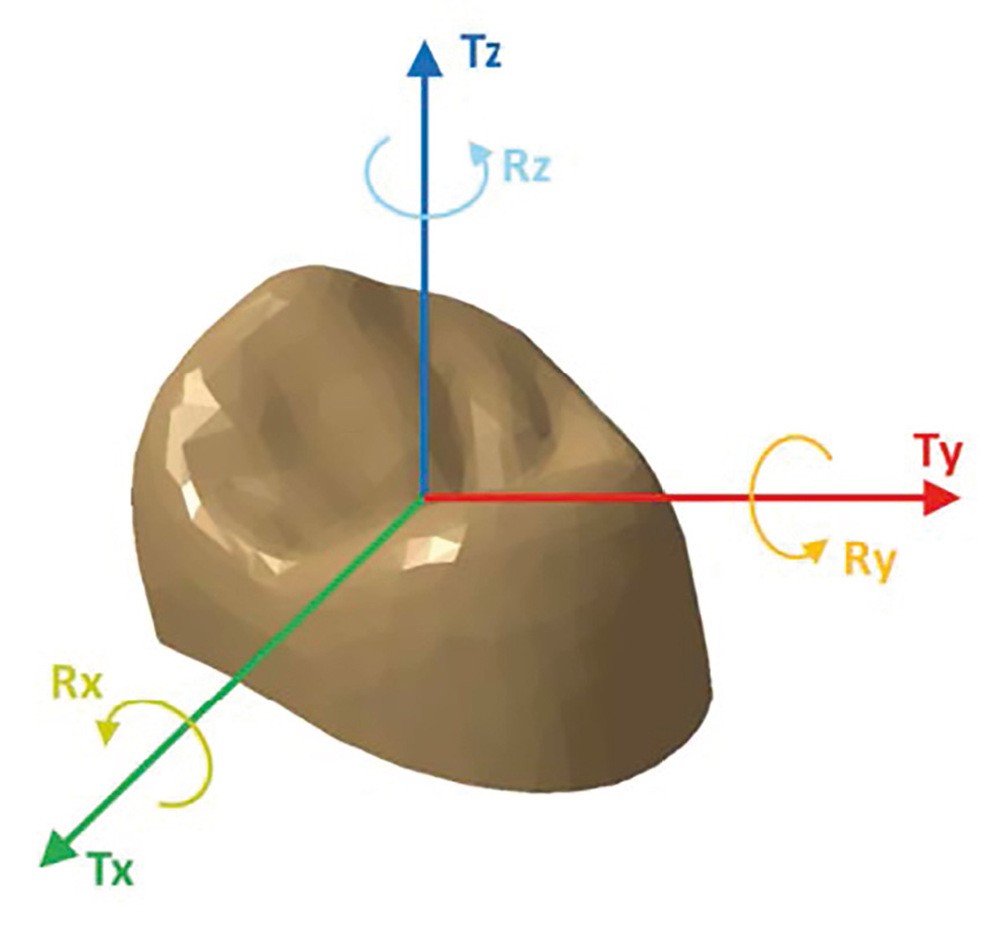
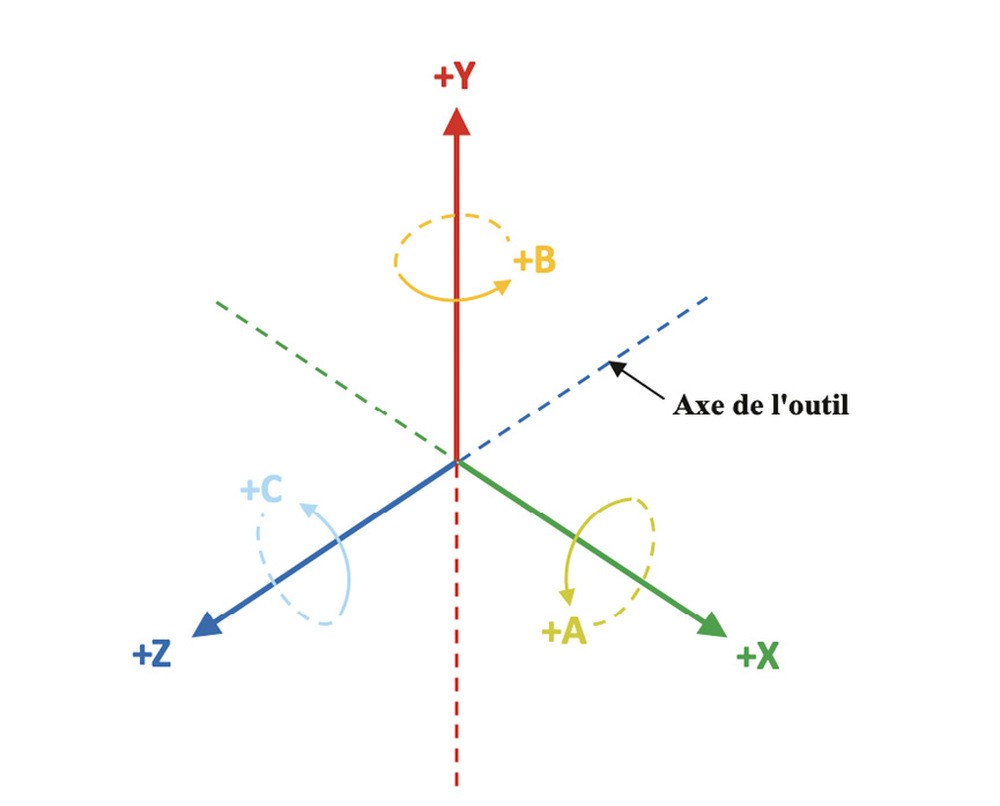
Pour tout objet dans l’espace, il existe six mouvements possibles (trois translations notées : Tx, Ty, Tz, et trois rotations notées : Rx, Ry, Rz). Ces mouvements s’opèrent respectivement suivant et autour des axes d’un repère orthonormé direct X, Y et Z (fig. 1). Ces mouvements sont appelés « Degrés de liberté » (DDL) (degrees of freedom, DOF). Les trois translations permettent à l’objet d’atteindre n’importe quel point dans l’espace. Les trois rotations offrent la possibilité d’orienter l’objet autour d’un point.
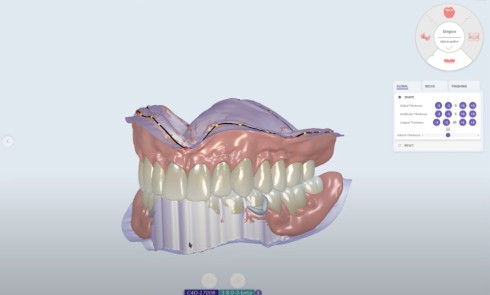
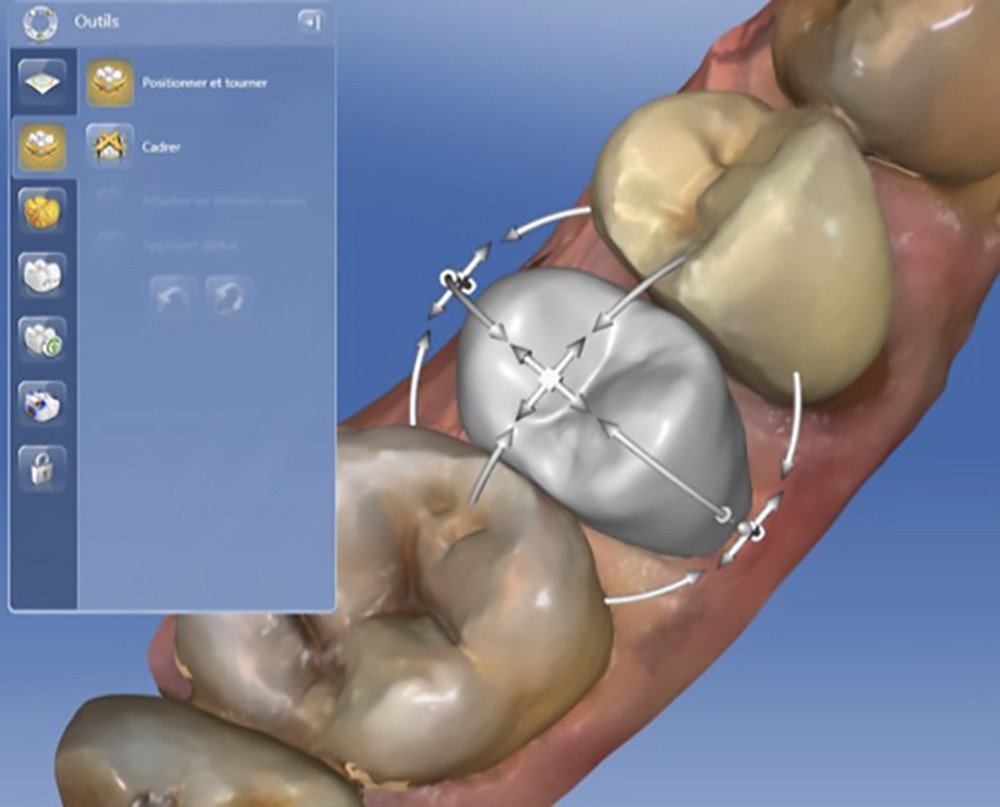
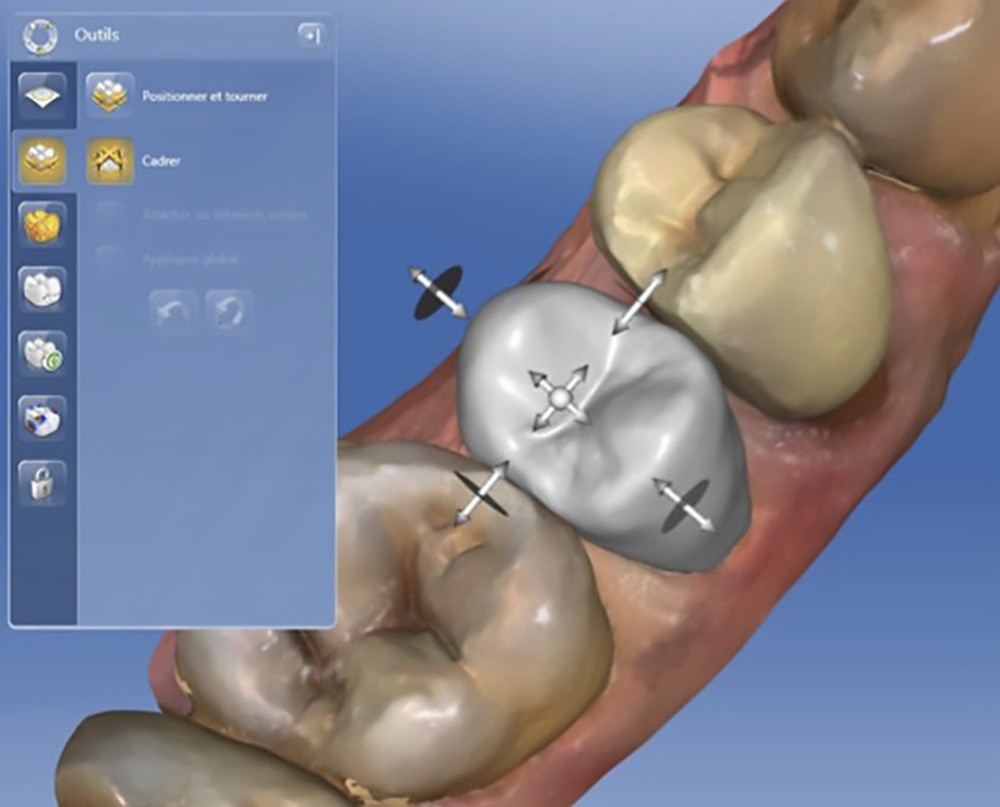
De la même façon, ce sont ces six degrés de liberté qui sont mis en œuvre pour positionner virtuellement la prothèse sur la dent préparée au travers d’un logiciel de CFAO dentaire (fig. 2a, b).
Cinématique
La cinématique (kinematic, en anglais) est la branche de la physique qui étudie les mouvements (ciné- du grec kinêsis, mouvement). La génération d’une surface, surtout si elle est complexe, comme dans le secteur dentaire, oblige à combiner et à coordonner les mouvements (translations et rotations) de l’outil par rapport à la pièce à usiner.
La cinématique d’une machine d’usinage correspond à la structure (assemblage) des différents axes (linéaires et rotatifs) ainsi qu’aux choix technologiques associés qui sont faits.
Axes principaux
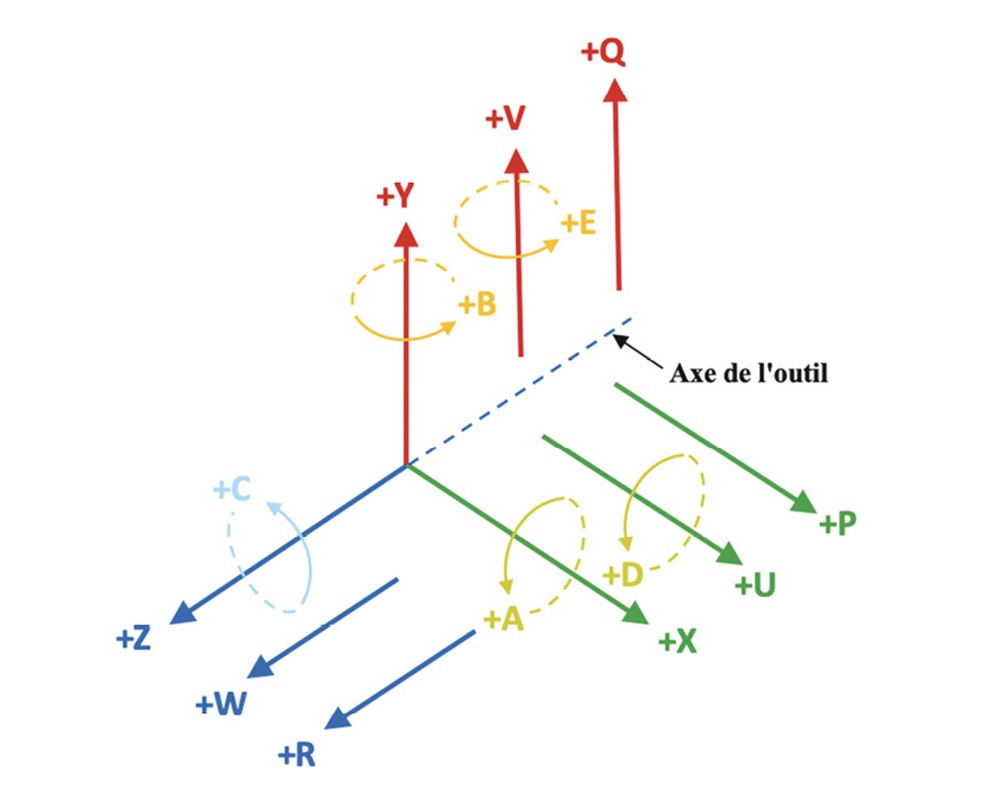
D’après les normes ISO 2806 et ISO 841 [1,2], un axe est défini comme étant la direction dans laquelle une partie de la machine peut bouger dans un mode linéaire ou rotatif (fig. 3a). Les mouvements linéaires principaux de la machine, parallèles aux axes du système d’axes machine sont désignés par X, Y et Z. A, B et C désignent respectivement des axes rotatifs autour des axes linéaires X, Y et Z.
• Axe Z : il est parallèle à l’axe de rotation de la broche principale de la machine. Quand il existe plusieurs…